关于梯度消失和梯度爆炸
梯度消失和梯度爆炸在初期一直是深度神经网络训练的一个难点,但前人做的许多工作已经基本上解决了这个问题。但研究这个问题还是有必要的,其涉及到神经网络优化的基本原理。
缓解梯度消失和梯度爆炸的方法
- 残差连接
任何搞深度学习的人都知道何凯明大神的著作 [1512.03385] Deep Residual Learning for Image Recognition,其提出了残差连接的方式,解决了梯度消失的问题,让更深的神经网络更容易训练,且其效果不逊色于浅层神经网络。
关于残差连接是如何解决梯度消失问题的,详细的公式推导或许还不如直觉上的理解,其实就可以简单地认为残差连接将梯度进行了分流,分成了两个部分的和,其中有一个恒等映射的梯度是 1,所以梯度可以通过这一部分传到后续的层中。
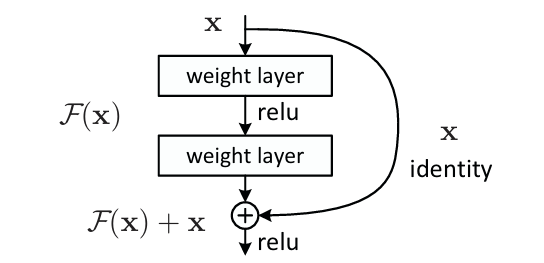
另外,残差网络的另一个思想就是,深层网络应该具有不逊色于浅层网络的效果,毕竟只要多出来的层是一个恒等映射就能保证效果持平。然而让神经网络学习一个恒等映射比全零映射要困难得多,所以我们干脆人为地把输入加到输出中去,这样网络的部分只要学习全零映射,整个模块就能够实现恒等映射的效果。
此外还有许多方法来解决梯度消失和梯度爆炸的问题:
- 激活函数
原来的神经网络使用 tanh 或者 sigmoid 函数来作为激活函数,但是这些函数在权重绝对值大的地方梯度近似为 0,多层网络的叠加会导致梯度非常接近于 0,造成梯度消失。Relu 激活函数的提出解决了这一问题,它在任何大于 0 的点处梯度都是 1,梯度在进行传递时不会有缩放效应。
- 权重正则化与初始化
权重正则化是避免梯度爆炸的一个方法,其在损失项中加入模型的权重,防止模型的权重过大导致梯度累乘的结果过大。另外初始化也是有讲究的,一般会将模型的参数初始化为均值为 0 的正态分布。
- 批归一化
初始化与权重正则化是针对神经网络参数的优化,BN(Batch Normalization)操作则是针对网络输入进行的优化,它保证了输入遵循特定的分布,不会发生偏移,使模型更好训练,也缓解了梯度的问题。
GRU 网络与梯度消失
GRU(gated recurrent units)是对循环神经网络 RNN 的一个改进,其在 LSTM 之后提出,使用了更新门(update gate) 和 重置门(reset gate) 来捕获序列中长期和短期的依赖关系,控制信息的遗忘与传递,从而缓解梯度消失/爆炸问题。
其基本原理如下所示:
- 输入序列:\(x_t \in \mathbb{R}^n\)
- 上一时刻的隐藏状态:\(h_{t-1} \in \mathbb{R}^d\)
- 当前时刻输出:\(h_t \in \mathbb{R}^d\)
更新门(update gate):控制当前状态有多少来自过去(记忆) vs 当前输入(新信息)
\[z_t = \sigma(W_z x_t + U_z h_{t-1} + b_z)\]重置门(reset gate):控制前一状态对当前候选状态的影响程度
\[r_t = \sigma(W_r x_t + U_r h_{t-1} + b_r)\]其中:
- $\sigma$ 是 sigmoid 函数,输出在 $(0, 1)$
- $W_z, U_z, W_r, U_r$ 是待学习的权重矩阵
计算候选隐藏状态(新记忆):
\[\tilde{h}_t = \tanh(W_h x_t + U_h (r_t \odot h_{t-1}) + b_h)\]- 这里使用重置门 $r_t \odot h_{t-1}$ 来控制前一状态的贡献;
- 如果 $r_t \approx 0$,表示“忘掉之前的信息”;
- 如果 $r_t \approx 1$,表示“完全保留之前的信息”。
计算最终隐藏状态(平衡新旧信息):
\[h_t = (1 - z_t) \odot h_{t-1} + z_t \odot \tilde{h}_t\]关于 GRU 网络为什么能缓解梯度消失的问题,可以看其计算最终隐藏状态的公式,它把梯度分成了两部分的和,允许梯度直接从上一层流动过来,采用的是和 ResNet 一样的梯度分流的策略。极端情况下如果 \(z_t = 0\),结果就相当于直接把上一个状态复制过来。
所以其实我们可以看出,GRU 和 ResNet 的思想还是很相似的,GRU 是 2014 年提出的,ResNet 是 2015 年提出的,两者就相差了一年时间,或许何凯明参考了 GRU 的这部分思想也说不准?:)
Leave a comment